岩城チーム
介護生活支援ロボット(実世界クリッカーによる物体操作教示インタフェースと支援ロボットシステム)、空気噴流による非接触物体操作(エアジェットマニピュレーション)、ギターによるダンシングロボット制御(ジャムセッションパートナー)を3本柱として研究を進めています。これらは、広島大学、NTT研究所やTUM(ミュンヘン工科大学) https://www.mw.tum.de/mimed/startseite/ 、芝浦工業大学等との共同研究も進めています。
池田チーム
ロボットを利用する人の計測と理解に興味を持っています.日常環境で人と共生するロボットには,人の行動や気持ちを理解して振る舞う機能が必須です.人の体の動きの計測や,心拍・発汗などの生理的指標によるストレスの計測技術に基づいて,人の意図や快適さを理解して賢く行動するロボットの研究を進めています.具体的には,自動運転の車いすロボットの搭乗者や,自動運転のドライバーの計測に取り組んでいます. SUBARU,ATR,聖マリアンナ医科大と連携して実験を進めています.
高井チーム
当チームでは、移動ロボットを使ったセンシングや遠隔制御、複数の移動ロボットによる 共同作業や情報の共有方式・相互通信ネットワークのプロトコル開発などの研究に取り組んでいます。 また、移動ロボットに搭載する、高感度で多機能なインテリジェント・センサや機能複合型の 赤外線通信機などの実験装置を開発しています。
川本チーム
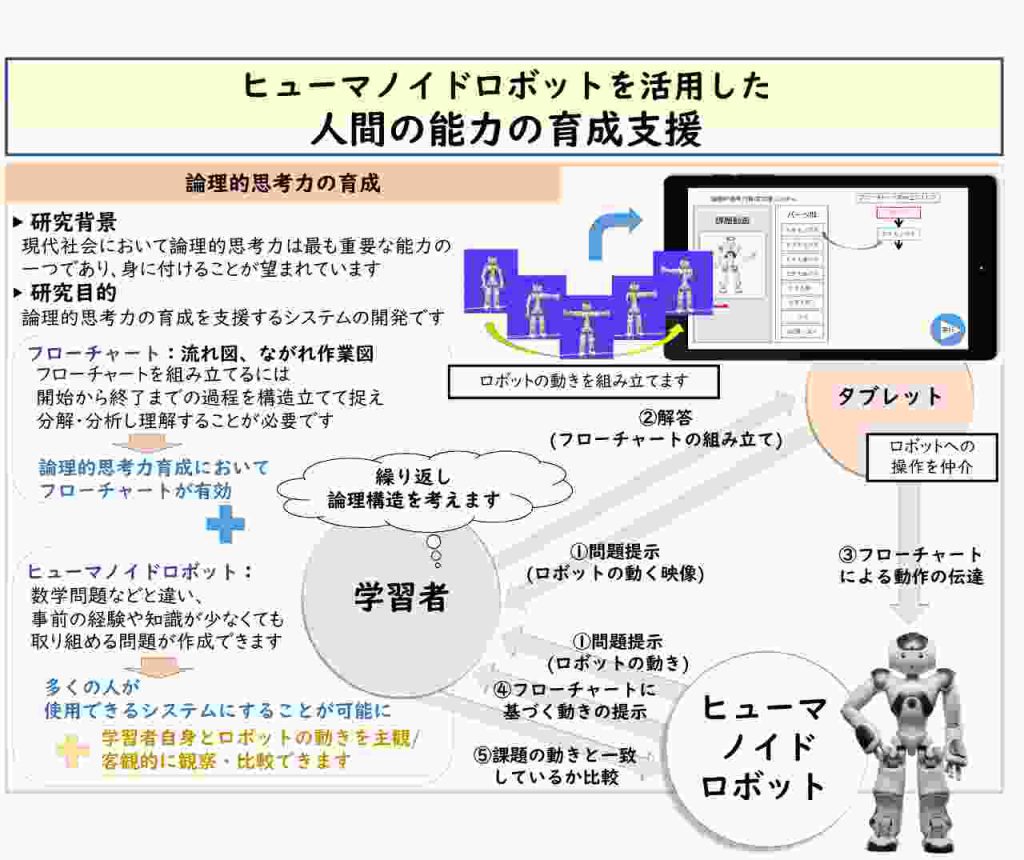
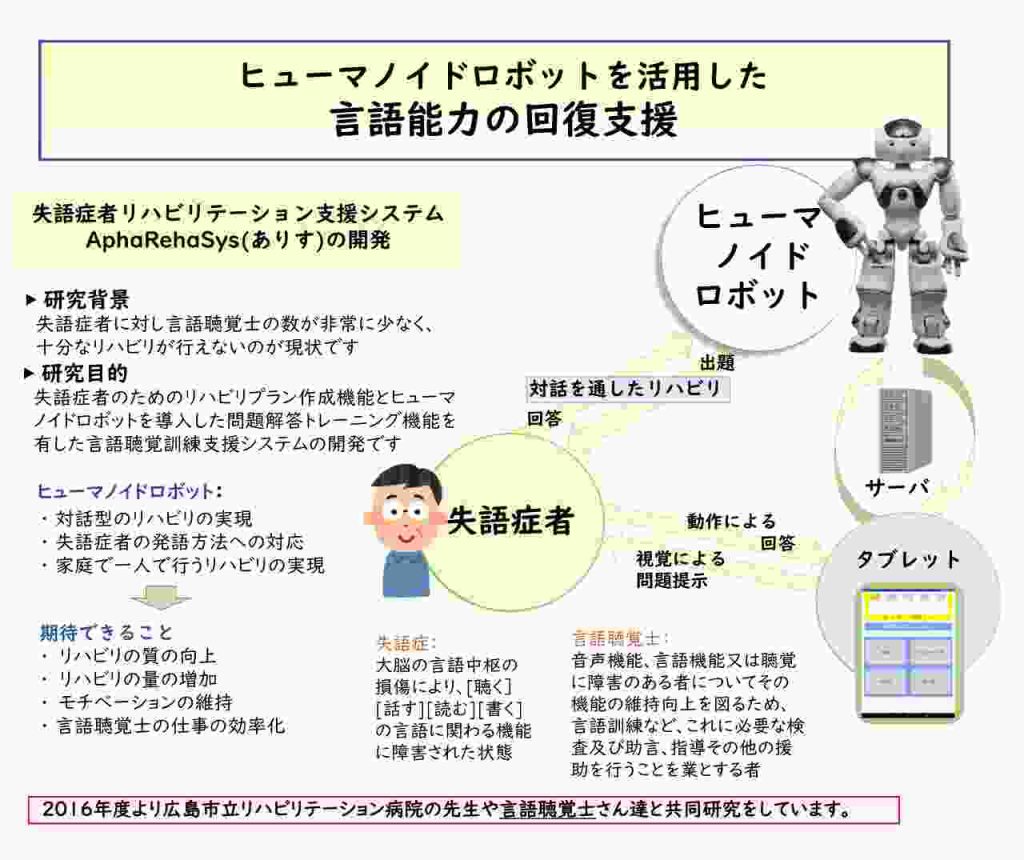
ヒューマノイドロボット(人間の形をしたロボット)を活用して,人間の能力の向上を目指す学習システムを開発しています.現在は特に現代社会において最も重要な能力の一つである「論理的思考力」の育成を対象にしています.また,ヒューマノイドロボットを活用して,病気やケガにより一旦損なわれた言語に関わる「聴く」「話す」「読む」「書く」機能の回復を目指す「失語症者リハビリテーション支援システムAphaRehaSystem(ありす)」を医師や言語聴覚士と共に開発しています.
最近の研究例 ※画像をクリックすると動画が見れます
実世界クリッカー
 体の不自由な被介護者が周りの実物体操作に関する意思を簡単かつ正確に介護者および 介護支援ロボットに伝達するための介護支援システム実世界にある物体をクリックやドラッグ&ドロップすることで ロボットに簡単かつ正確に指示を出すことができるロボットインタフェースです。 実物体へのポインティングにはマウスの動きと連動したレーザポインタを用いて行い、指示内容の決定はPC内で行います。 レーザポインタを使用しているので遠くの物体でも明確に指示することができます。 また、指示を行う際に、計測した物体の3次元座標をもとに、周辺環境をデータベース化することや地図化することもできます。
体の不自由な被介護者が周りの実物体操作に関する意思を簡単かつ正確に介護者および 介護支援ロボットに伝達するための介護支援システム実世界にある物体をクリックやドラッグ&ドロップすることで ロボットに簡単かつ正確に指示を出すことができるロボットインタフェースです。 実物体へのポインティングにはマウスの動きと連動したレーザポインタを用いて行い、指示内容の決定はPC内で行います。 レーザポインタを使用しているので遠くの物体でも明確に指示することができます。 また、指示を行う際に、計測した物体の3次元座標をもとに、周辺環境をデータベース化することや地図化することもできます。ICAT2014 WAC2014 (Jamshidi & Madni Award 受賞) HNICEM2015
ジャムセッションパートナー

エレキギターの音に反応してロボットが踊ります。 音源からロボットへの一方向ではなく、ギター演奏とロボットモーションとが双方向に刺激を与え続けるモーションメディアコンテンツです。 音量・音程・コード・リズムのみならず、チョーキング、スライド、ハンマリング等のギター特殊奏法にも反応するので、ギタリストの繊細な情感をロボットモーションに反映させることができます。 ロボット側に楽器(パーカッション)を持たせることで、ギタリストとロボットとのバトル(掛け合い)が実現されます。ギター音から得た特徴量を基に、ロボットの演奏モーションを適切に選択します.その選択の際に,機械学習を用いて観衆のパフォーマンス評価を取り入れる手法の研究をしています.
ROBOMEC2010 第6回モーションメディアコンテンツコンテスト優秀賞
快眠枕

ピストンシリンダー駆動機構により空気袋内空気圧を調整することで、枕の高さと感触をユーザの好みの値に変えることができます。 空気枕に異物を装着することを避けるために、空気圧センサとピストン位置センサのみを用いた、オープンループ構造によるインピーダンス制御を実現しています。 市販の高反発・低反発枕等との感触比較のための被験者評価実験も行っています。
また同様の装置2台を利用しそれぞれ離れた場所で使うことで、頭部の動きにより感情を伝え合うモーションメディア通信を行います。 インターネット経由のバイラテラルサーボを実現することで、空気枕内の空気圧変化を実時間双方向に伝え合います。
電気情報関連学会2009 (電気学会中国支部奨励賞) SMC2010 ISMA2008 Pervasive2008
枕インタフェース

枕上の頭部動作によりPCのマウスのような操作が可能です。 空気圧を測定可能な長方形状空気枕ユニット4個を、井桁状・2階層に構成することで、上下左右方向の微妙な頭の動きが計測可能です。 クリック・ドラッグ・ドロップ等の操作も可能です。顔や頭に特殊な器具を装着することなく、就寝時誰もが必ず利用する枕を改良することで自然な操作インタフェースを目指します。 上腕部の運動弱者のみならず、他の作業で手が使えない状態の健常者が使うインタフェースとしての可能性も検討しています。
SI2010 HISS2010 (HISS優秀研究賞およびHISS優秀プレゼンテーション賞)
複数のエアジェットによる物体操作システム

非接触物体操作技術は、摩擦が無い・伝達機構が要らない・視野を妨げない等、優れた特長があります。 本研究では複数のエアジェットを四方八方から吹き付け、そのエアジェットノズルの角度と噴出量を制御することで 複数の物体に対する位置の制御行います。エアジェットは物体を押す方向にのみ力を与えることが可能ですので、 ロボットハンド同様なユニラテラル物体操作技術が必要です。 さらには、拡散性・無駄時間特性・干渉特性等、 様々な解決すべき問題も多く、1つの物体に対して平面上1自由度制御問題や平面上3自由度(2並進+1回転)制御問題に取り組み、 現在4つのノズルを用いて複数の小物体を集団的に制御する基礎実験を進めています。 空気浮上型の物体搬送装置の水平方向推進方式としての将来的応用を考えています。
平面2自由度(XY)制御 平面3自由度(XYΘ)制御 平面複数物体制御
空間リレー 人間投球とキャッチング 速度型PID制御キャッチ
プロジェクタロボット
 カメラとプロジェクタを搭載した人間共存型移動ロボットです。 人間が日常生活を送る上で必要となる様々な画像映像情報を、家具・電気製品・壁・床等の適切な位置に投影表示することにより、人間の行動を視覚的に助けます。 プロジェクタ自体が部屋中を移動することで、天井プロジェクタからは投影しにくい場所でも、きめ細かくサポートが可能です。 人間との衝突を避けるためにロボットが自律移動中でも、指定した場所に常に画像コンテンツを正しく表示し続けるために、追従投影技術を開発中です。
カメラとプロジェクタを搭載した人間共存型移動ロボットです。 人間が日常生活を送る上で必要となる様々な画像映像情報を、家具・電気製品・壁・床等の適切な位置に投影表示することにより、人間の行動を視覚的に助けます。 プロジェクタ自体が部屋中を移動することで、天井プロジェクタからは投影しにくい場所でも、きめ細かくサポートが可能です。 人間との衝突を避けるためにロボットが自律移動中でも、指定した場所に常に画像コンテンツを正しく表示し続けるために、追従投影技術を開発中です。
パワーポイントロボット
 ポスターセッションや製品紹介等の場面で、あなたに代わりプレゼンをしてくれるロボットです。 MicrosoftのPowerPointと音を使ってコラボするために、音をキャリアとする周波数多重化振幅変調方式により、多自由度モーションデータをロボットプログラムへリアルタイム送信します。 スライドショー内の任意のオブジェクトに対応したディスプレイ座標を送信することにより、ロボットはレーザポインタを手に持って、そのオブジェクトを実空間側からポインティングします。 パワーポイントが持つ豊富なメディア表現力に、ロボットならではのモーションメディアを加えることで、サイバー空間と実空間とがリンクしたオートプレゼンを実行します。
ポスターセッションや製品紹介等の場面で、あなたに代わりプレゼンをしてくれるロボットです。 MicrosoftのPowerPointと音を使ってコラボするために、音をキャリアとする周波数多重化振幅変調方式により、多自由度モーションデータをロボットプログラムへリアルタイム送信します。 スライドショー内の任意のオブジェクトに対応したディスプレイ座標を送信することにより、ロボットはレーザポインタを手に持って、そのオブジェクトを実空間側からポインティングします。 パワーポイントが持つ豊富なメディア表現力に、ロボットならではのモーションメディアを加えることで、サイバー空間と実空間とがリンクしたオートプレゼンを実行します。
倒立振子型ロボット
 2つの車輪を使い倒れないように安定化制御しながら動きます。 狭い所を俊敏に移動可能なので、人間との共存が可能です。 電源オフ時には4輪、重量物搬送時は3輪、高速搬送時は2輪と、置かれた状況に応じて走行モードを切り替えることで、現実的な搬送ロボットとしての実用性を評価・研究しています。 つくばチャレンジにも挑戦しました。JSDとの共同研究です。
2つの車輪を使い倒れないように安定化制御しながら動きます。 狭い所を俊敏に移動可能なので、人間との共存が可能です。 電源オフ時には4輪、重量物搬送時は3輪、高速搬送時は2輪と、置かれた状況に応じて走行モードを切り替えることで、現実的な搬送ロボットとしての実用性を評価・研究しています。 つくばチャレンジにも挑戦しました。JSDとの共同研究です。
安心して共存できるロボット
 自動運転の車いすは目的地を指定するだけで経路を計算して移動するため,搭乗者は操作を続ける必要が無く便利です.しかし,前方に置かれた障害物をちゃんと避けてくれるか,周りの人に衝突しないか,搭乗者や周囲の人は不安に感じることがあります.搭乗者の感じる不安やストレスを,心拍・発汗などの生理的指標を用いて計測してモデル化し,安心感を高める移動速度や経路で車いすを制御します.また,自動車の運転シミュレータを用いて自動運転のドライバーを計測する実験も行います.効率的に動くロボットだけでなく,人の気持ちを理解して動くロボットの研究に取り組んでいます. (詳しくはこちら)
自動運転の車いすは目的地を指定するだけで経路を計算して移動するため,搭乗者は操作を続ける必要が無く便利です.しかし,前方に置かれた障害物をちゃんと避けてくれるか,周りの人に衝突しないか,搭乗者や周囲の人は不安に感じることがあります.搭乗者の感じる不安やストレスを,心拍・発汗などの生理的指標を用いて計測してモデル化し,安心感を高める移動速度や経路で車いすを制御します.また,自動車の運転シミュレータを用いて自動運転のドライバーを計測する実験も行います.効率的に動くロボットだけでなく,人の気持ちを理解して動くロボットの研究に取り組んでいます. (詳しくはこちら)ヒューマノイドロボットの教育利用

{kind=link}