Tetsushi IKEDA
top page profile research projects publicationsPedestrian tracking and modeling in public space
Pedestrian behavior model and prediction of future behavior
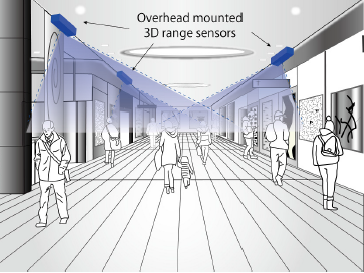
| We measured the positions of pedestrians in environments with many people, such as train stations and shopping malls, and built movement models of pedestrians. These behavioral models are being applied to simulation of pedestrian behavior, prediction of future pedestrian mobility, and path planning for a mobile robot moving among pedestrians. |
 |
Francesco Zanlungo, Tetsushi Ikeda, and Takayuki Kanda, Potential for the dynamics of pedestrians in a socially interacting group, Physical Review E 89, 012811 (2014) URL: http://link.aps.org/doi/10.1103/PhysRevE.89.012811, doi:10.1103/PhysRevE.89.012811
Drazen Brščić, Tetsushi Ikeda, Takayuki Kanda, Takahiro Miyashita, Person Tracking in Large Public Spaces Using 3-D Range Sensors, IEEE Trans. on Human-Machine Systems, Vol. 43, No. 6, pp. 522-534, 2013, doi:10.1109/THMS.2013.2283945
Zeynep Yücel, Francesco Zanlungo, Tetsushi Ikeda, Takahiro Miyashita, and Norihiro Hagita, Deciphering the Crowd: Modeling and Identification of Pedestrian Group Motion, Sensors 2013, 13(1), 875-897, 2013, doi:10.3390/s130100875, [LINK]
Francesco Zanlungo, Tetsushi Ikeda, and Takayuki Kanda, A Microscopic “Social Norm” Model to Obtain Realistic Macroscopic Velocity and Density Pedestrian Distributions, PLoS ONE 7(12): e50720. doi:10.1371/journal.pone.0050720, [LINK]
Francesco Zanlungo, Tetsushi Ikeda, and Takayuki Kanda, Social force model with explicit collision prediction, EPL, 93 (2011) 68005, pp. 1-6, 2011. doi:10.1209/0295-5075/93/68005
Zeynep Yucel, Francesco Zanlungo, Tetsushi Ikeda, Takahiro Miyashita, Norihiro Hagita, "Modeling Indicators of Coherent Motion," Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp.2134-2140, 2012. 2012.10.7-12
Tetsushi Ikeda, Yoshihiro Chigodo, Daniel Rea, Francesco Zanlungo, Masahiro Shiomi, Takayuki Kanda, "Modeling and Prediction of Pedestrian Behavior based on the Sub-goal Concept," Robotics Science and Systems (RSS), 2012
Francesco Zanlungo, Yoshihiro Chigodo, Tetsushi Ikeda, and Takayuki Kanda, "Experimental study and modelling of pedestrian space occupation and motion pattern in a real world environment," Proc. 6th Int. Conf. on Pedestrian and Evacuation Dynamics (PED), pp. 289-304, 2012. June 6-8, 2012
Zeynep Yucel, Tetsushi Ikeda, Takahiro Miyashita, and Norihiro Hagita, "Identification of Mobile Entities Based on Trajectory and Shape Information," Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3589-3594, 2011.
Tetsushi Ikeda, Yoshihiro Chigodo, Takahiro Miyashita, Fumio Kishino, and Norihiro Hagita, "A Method to Recognize 3D Shapes of Moving Targets based on Integration of Inclined 2D Range Scans," Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3575-3580, 2011.
Ubiquitos Market
| We have constructed a system in which a clerk robot installed in a convenience store recommends products based on the behavior of customers in the store. The robot estimates each person's interests based on his or her movements within the store, and recommends products that are relevant or likely to be of interest. |
 |
Koji Kamei, Tetsushi Ikeda, Hiroyuki Kidokoro, Masahiro Shiomi, Akira Utsumi, Kazuhiko Shinozawa, Takahiro Miyashita, Norihiro Hagita, "Effectiveness of Cooperative Customer Navigation from Robots around a Retail Shop, "Third IEEE Int. Conf. on Social Computing (SocialCom), pp.235-241, 2011.
Kotaro Okamoto, Akira Utsumi, Tetsushi Ikeda, Hirotaka Yamazoe, Takahiro Miyashita, S. Abe, and Norihiro Hagita, "Classifcation of pedestrian behavior in a shopping mall based on LRF and camera observations," 12th IAPR Conf. on Machine Vision Applications (MVA), pp. 1-5, 2011. June 13-15, 2011
Koji Kamei, Kazuhiko Shinozawa, Tetsushi Ikeda, Akira Utsumi, Takahiro Miyashita, and Norihiro Hagita, "Recommendation from Robots in a Real-world Retail Shop," 12th Int. Conference on Multimodal Interfaces and 7th Workshop on Machine Learning for Multimodal Interaction (ICMI-MLMI), vol. 19, pp. 1-8, Nov. 2010.